GRiSP History and Timeline
GRiSP has been used for embedded systems since 2013, bringing Erlang to hardware, IoT and distributed applications. This timeline highlights key milestones from the first concept to the current GRiSP ecosystem and GRiSP.io.
2013
The Birth of GRiSP
Peer Stritzinger's transition from C to Erlang led to the first concept of GRiSP, introduced during the Erlang User Conference. This laid the groundwork for embedded real-time systems.


2015
Early Prototypes and Bosch Collaboration
Specialized boards developed for Bosch ran Erlang for distributed systems, showcasing GRiSP's industrial potential and open-source adaptability.
2016
Wireless Applications and Prototyping
Adam Lindberg's demo at Erlang Factory Lite in Berlin highlighted GRiSP's IoT capabilities, sparking interest in real-time embedded applications.

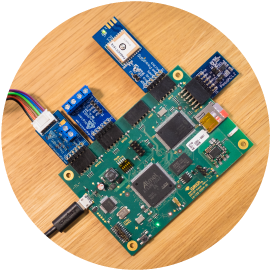
2017
GRiSP 1 Launch
The first GRiSP board, with Digilent Pmod™ compatible connectors, introduced modular hardware for embedded systems.
2018
Workshops and Community Engagement
A full-day Code BEAM STO workshop showcased GRiSP's embedded and distributed application potential to developers.
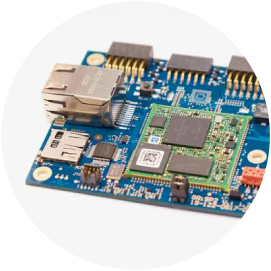
2019
GRiSP 2 Kickstarter Campaign
Funded by a successful Kickstarter campaign, GRiSP 2 introduced Ethernet support, faster boot times, and modular design for more advanced applications.
2022
GRiSP 2 Goes to Production
GRiSP 2 went into production and shipped, with enhanced capabilities for embedded systems development.

2023
GRiSP.io Vision
Peer Stritzinger shared the GRiSP.io roadmap at Lambda Days, introducing GRiSP.io for distributed and edge computing applications.
2024
GRiSP.io Beta and Braid
GRiSP.io's beta launched at Code BEAM Stockholm, alongside Braid, a system connecting Erlang nodes across cloud and edge platforms.

2025 and beyond
Built for the Edge, Shaped by the Community
Planned work includes Kickstarter campaigns for new Digilent Pmod™ compatible expansions, Two-B (a self-balancing robot kit), Rebar enhancements for the BEAM ecosystem and GRiSP Nano production.
Stay in the loop as we continue to develop GRiSP and BEAM tooling.
Join GRiSP Email List