GRiSP: Advancing Embedded Systems for Over a Decade
More than 11 years ago, GRiSP began as an experiment to simplify real-time embedded development using Erlang. Frustrated with C's limitations, Peer Stritzinger discovered Erlang's distribution capabilities, transforming how embedded systems could be developed. That small idea has since grown into an ecosystem of tools and hardware, empowering developers to create real-time applications.
From its official introduction at the Erlang User Conference on 13 May 2013, GRiSP has consistently pushed boundaries. Early prototypes, including boards developed for Bosch Rexroth, showcased GRiSP's potential in industrial manufacturing. By 2017, the launch of GRiSP 1 brought modular hardware with Diligent Pmod™ Compatible connectors, simplifying the integration of sensors and actuators for embedded systems.
The community embraced GRiSP, with workshops at events like Code BEAM STO highlighting its use in IoT and distributed applications. By 2019, GRiSP 2 had launched through a successful Kickstarter campaign, introducing Ethernet support, faster boot times, and a modular design. These advancements reinforced GRiSP's commitment to evolving with developers' needs.
GRiSP-io and Cloud Integration (2024)
The beta launch of GRiSP-io at Code BEAM Stockholm in 2024 marked another leap forward. GRiSP-io bridges cloud and edge computing, providing tools to simplify distributed applications. At the same event, Peer Stritzinger showcased Braid, a secure orchestration system for Erlang nodes. This demo highlighted how GRiSP continues to address complex challenges in distributed and embedded development.
Recent Developments (2025)
In March 2025, Peer presented Livebook Meets GRiSP at CodeBeam America, where he demonstrated how integrating Livebook with GRiSP-io can simplify IoT development and make it more interactive and collaborative.
In June 2025 at Code BEAM Light Stockholm, Peer presented GRiSP Nano milestones, showing how the prototype could boot Erlang in just 16 MB of RAM and outlining the next steps toward production. On 04 June 2025, two days after the talk, the prototype reached an Erlang shell prompt, confirming the approach and setting the direction for the first batch.
Future GRiSP Projects and Roadmap
Looking ahead, the future is bright. Exciting projects are also on the horizon:
- Kickstarter campaigns are planned for new Diligent Pmod™ Compatible expansions, offering more ways to extend GRiSP's capabilities.
- Campaigns for Two-B, a modular self-balancing robot kit, and Rebar3, enhancing its integration with the Erlang/OTP ecosystem, will expand GRiSP's impact.
- For GRiSP Nano, a Kickstarter will support its production, bringing this compact, innovative board to life.
From an experiment in automotive systems to a growing ecosystem, GRiSP's journey reflects innovation, persistence, and collaboration. And this is just the beginning.
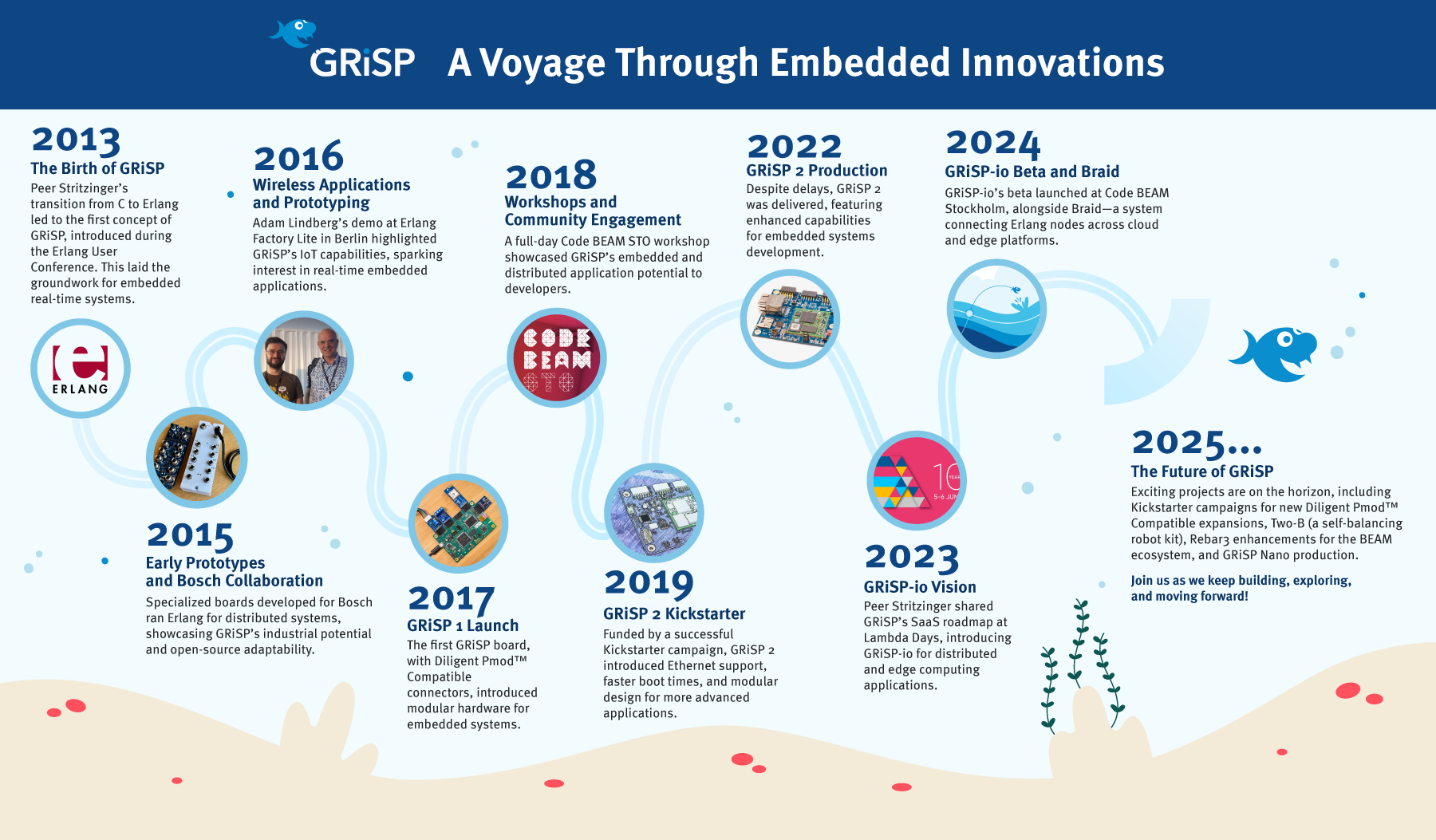
Below, we've captured our progress so far in an infographic, showing where we started, how far we've come, and where we're headed.
We invite you to join us on this journey. Stay connected for updates, insights, and the latest developments in the GRiSP world.
- Visit GRiSP.org to explore our software stack, hardware offerings, and resources.
- Check out GRiSP.io to try the beta platform.
Sources and References
2013
- Erlang User Conference 2013 - GRiSP Announcement
- Erlang Factory Speaker Page - Peer Stritzinger
2016
- Wireless Small Embedded Erlang Applications - Adam Lindberg (Erlang Factory Lite)
2017
- Erlang & Elixir Factory San Francisco 2017 - GRiSP Ecosystem (first GRiSP board)
- Diligent Pmod™ Compatible Connectors - Hardware expansion modules
2018
- Free Workshop in Stockholm - Code BEAM STO workshop
2019
2023
- Lambda Days 2023 - GRiSP Roadmap
2024
- Code BEAM Stockholm 2024 - Braid Demo
2025
- CodeBeam America 2025 - Livebook Meets GRiSP
- GRiSP Nano Code BEAM STO Talk - GRiSP Nano milestones